DG20.IRبهترینها؛برق،مکانیک،ساختمان،تکنولوژی،مدیریت،زبان
مطالبی در زمینه برق ،مکانیک ،کامپیوتر ،معماری ،کنترل ،الکترونیک ، مخابرات،ابزار دقیق ،هوش مصنوعی ، روباتیک، فتونیک، اویونیکAvionic ،فیزیک ،ساختمان ، تاسیسات، تکنولوژی جدید، موبایل ،مدیریت و کارآفرینی، آموزش زبان و مطالعه،خواندنی های اینترنت و انرژی مثبتDG20.IRبهترینها؛برق،مکانیک،ساختمان،تکنولوژی،مدیریت،زبان
مطالبی در زمینه برق ،مکانیک ،کامپیوتر ،معماری ،کنترل ،الکترونیک ، مخابرات،ابزار دقیق ،هوش مصنوعی ، روباتیک، فتونیک، اویونیکAvionic ،فیزیک ،ساختمان ، تاسیسات، تکنولوژی جدید، موبایل ،مدیریت و کارآفرینی، آموزش زبان و مطالعه،خواندنی های اینترنت و انرژی مثبتطراحی سیستمهای لوله کشی
سیالات موادی هستند که شکل ظرفی را که درون آنها قرار دارند، به خود میگیرند و لذا برای انتقال آنها، به محیطی واسطه نیاز داریم. بشر از دیرگاه برای انتقال سیال بصورت پیوسته از لوله استفاده مینمود. لوله ها در طولها، اشکال و اندازههای مختلف بکار میروند . آیا تا به حال به شکل لوله ها توجه کردهاید ؟ زیاد شدن طول لوله یا قطر لوله ها چه اثری بر روی انتقال سیال و میزان مصرف انرژی خواهد گذاشت؟ چرا لوله ها را به صورت مستقیم استفاده میکنند؟ اگر لوله ها را خم کنند یا حتی بپیچانندچه تغییری در جریان مشاهده میکنیم؟
گاهی از اوقات لوله حاوی سیال را گرم و یا سرد میکنند و با این عمل ، از لوله یک مبادله گر حرارتی میسازند. با توجه به این موضوع به سوالات بالا چنین پاسخ میدهیم.
لوله در اینجا مجرایی است که سیال در داخل آن جریان مییابد و همزمان گرم یا سرد نیز میشود. هنگامی که سیال لزجی وارد مجرایی میشود ، لایه مرزی، در طول دیواره تشکیل خواهد شد. لایه مرزی بتدریج در کل سطح مقطع مجرا توسعه مییابد و از آن به بعد به جریان، کاملا توسعه یافته (فراگیر ) گفته میشود. معمولا اگر طول لوله بلندتر از 10 برابر قطر لوله باشد آنگاه جریان توسعه یافته شده است.
اگر دیواره مجرا گرم یا سرد شود، لایه مرزی گرمایی نیز در طول دیواره مجرا توسعه خواهد یافت.
انواع مختلف لوله ها :
لوله ها در سایزهای مختلف با ضخامت های مختلف ساخته می شوند که سایز لوله ها از 1/2 و 3/4 و 1 و ..و 2 و 3و 5و 6و 7و 8و 9و .... اینچ ساخته میشوند و از 3 اینچ به بعد به صورت زوج بالا میرود و غیر از 5 اینچ که کاربرد کمتری دارد .قدرت لوله ها بیشتر توسط ضخامت و بحمل فشار آنها شناسایی می شود .
لوله ها ا با توجه به الیاژ ان و رعایت چهار استاندارد ذیل می سازند :
1-انجمن استاندارد ملی امریکا (a.n.s.i(
2-انجمن نفت امریکا a.p.i
3-انجمن مهندسین مکانیک امریکا a.s.m.e
4-انجمن تست و مواد امریکا a.s.t.m
انواع مختلف لوله عبارتند از :
1-لوله های فولادی
2-لوله های سربی
3-لوله های پلاستیکی
4-لوله های لاستیکی
5-لوله های مسی
6-لوله های المینیومی
7-لوله های شیشه ای
7-لوله های p.v.c
اگر گرمایش یا سرمایش، از ورودی مجرا شروع شود ، هم نمودار توزیع سرعت و هم نمودار توزیع دما بصورت همزمان توسعه مییابند. مسأله انتقال گرما در این شرایط ، به مسأله طول ورودی هیدرو دینامیکی و گرمایی تبدیل میشود که در بر گیرنده چهاذ حالت مختلف است و به اینکه هر کدام از دو لایه مرزی سرعت و دما در چه وضعیتی بسر میبرند(( کاملا توسعه یافته و یا در حال توسعه)) بستگی دارد.
در ناحیه کاملا توسعه یافته در داخل لوله ، عملا لایه مرزی وجود ندارد چون دو ناحیه مختلف، که یکی با سرعت جریان آزاد و دیگری تحت تاثیر دیواره باشد ، وجود نخواهد داشت و در سرتاسر لوله ، تمام نواحی تحت تاثیر دیواره قرار دارند. از آنجا لایه مرزی، مقاومتی در برابر انتقال حرارت است، لذا بیشترین میزان ضریب انتقال حرارت جابجایی در ابتدای لوله، یعنی در جایی که ضخامت لایه مرزی صفر است، مشاهده میشود. مقدار این ضریب به تدریج همزمان با افزایش ضخامت لایه مرزی و در نتیجه افزایش مقاومت در برابر انتقال حرارت، کاهش مییابد تا به مقدار آن در ناحیه کاملا توسعه یافته برسد که تقریبا مقداری ثابت است.
حال اثر تغییر شکلی خاص در لوله را روی ویژگیهای سرعت و انتقال حرارت بررسی میکنیم.
کویلهای حلزونی و مارپیچ ، لولههای خمیده ای هستند که بعنوان مبادله گرهای گرمای لوله خمیده در کاربردهای مختلف ایتفاده میشوند.
بیایید کویلهای مارپیچ یا حلزونی را تحلیل کنیم. سیالی را در درون این لوله ها در نظر میگیریم. آنچه در ابتدا نظرمان را به خود جلب میکند اینست که چون لوله ها بصورت مارپیچ (دایروی) پیچیده شدهاند، لذا در اثر حرکت دورانی و محوری، نیرویی به آنها وارد میشود و این خود باعث میشود تا شتاب سیال صفر نشود، حال سؤالی که اینجا مطرح میشود اینست که با وجود این نیرو، آیا جریان داخل مارپیچ، کاملا توسعه یافته است یا جریانی در حال توسعه است و پروفایل سرعت تغییر میکند. آیا دلیل بیشتر بودن h (ضریب انتقال حرارت جابجایی) در ناحیه، نیبت به لوله مستقیم نیز،این است(میدانیم که h در ناحیه کاملا توسعه یافته کوچکتر از h در ناحیه در حال توسعه است)؟ یا هیچکدام از اینها صحیح نیست و دلیل بزرگتر بودن ضریب انتقال حرارت جابجایی در این ناحیه چیز دیگری است؟
در اولین نگاه بنظر می رسد که جریان داخل کویل کاملا توسعه یافته نیست و دلیل بیشتر بودن h نیز همین است. با این حساب این جمله را چگونه توجیه کنیم که : دادههای محدود راجع به جریان آشفته در حال توسعه ، نشان میدهد که جریان ، در نیم دور اول کویل کاملا توسعه مییابد؟ اگر اینطور باشد پس دلیل افزایش h چیست؟
جریان داخل لوله را در مختصات استوانهای در نظر بگیرید که دارای سه مولفهӨ,z ,r است. هنگامیکه لوله مستقیم است، سرعت در دو راستای Ө ,r صفر بوده و فقط در راستای z سرعت داریم : و هنگامیکه لوله را خمیده یا مارپیچ میکنیم، بدلیل وجود نیروی گریز از مرکز و شتاب حاصل از آن (وسایر مولفههای شتاب ایجاد شده)، سرعت مولفه دیگری علاوه بر مییابد: که تابع r شعاع انحنا مارپیچ نیز هست. این مولفه جدید سرعت ، میل دارد حرکت چرخشی (Spiral) به سیال بدهد، یعنی سیال همزمان که در طول لوله به جلو میرود، حول خط مرکزی لوله دوران هم میکند اما علیرغم میلش همیشه موفق به این کار نمیشود. بنابراین نیروی گریز از مرکز عامل توسعه یافته نشدن جریان نخواهد بود بلکه در زمانی که بیشترین اثر را بر روی رژیم جریان بگذارد، آن را به سمت ناپایداری میبرد (تا پایداری جریان مصادف است با آشفته شدن آن) و حرکتی گردشی به سیال میدهد و بهر حال ، وجود نیروی گریز از مرکز با اینکه جریان در نیم دور اول کویل کاملا توسعه یافته شود، هیچ منافاتی باهم ندارد.
باز هم این سوال باقی میماند که دلیل افزایش h چیست؟ میدانیم که ضریب انتقال حرارت در جریان آشفته(Turbulent) و نیز جریان آشوبناک (Chaotic) ، بیش از ضریب انتقال حرارت در جریان آرام است، پس هر ابزاری که کمک کندجریان به سمت آشفته شدن یا آشوبناک شدن پیش رود باعث افزایش ضریب انتقال حرارت جابجایی میشود، خواه در مورد جریان در داخل لوله و خواه در مورد جریان بر روی لوله . وقتی لوله را بصورت مارپیچ در میآوریم با افزودن یک مولفه سرعت که میتواند پایداری جریان را در معرض خطر قرار دهد،جریان بسمت آشفته شدن پیش برده و باعث افزایش h شدهایم. اینکه کویل ما بصورت افقی یا قائم قرار گیرد نیز بر روی ضریب انتقال حرارت جابجایی ما موثر است بخصوص در سمت خارج لوله چون انتقال حرارت باعث تغییر چگالی سیال و ایجاد یک حرکت انتقالی در اثر نیروی ارشمیدس میشود که این حرکت اگر تقویت شده، به سمت توربولان شدن پیش میرود و یا روی حرکت کلی جریان تاثیر گذاشته، انرا به سمت توربولان شدن پیش برد، باعث افزایش ضریب انتقال حرارت جابجایی (h) میشود.
بحث دیگری که امروزه به منظور افزایش h بر همین مبنا مطرح است بحث استفاده از مبدلهای حرارتی آشوبناک است. به این معنی که برای افزایش ضریب انتقال حرارت و غالبا در کویلها، جریان را آشوبناک میکنند. عقیده این گروه بر این است که توربولان (آشفتگی) حالتی خاص از پدیده آشوب Chaos است و نیز در این جریان میزان تلفات انری بالاست. آنچه مسلم است و تجربه نیز گواه آن، اینست که بروز هر دو پدرده (آشفتگی و آشوبناکی) در جریان سیال باعث افزایش ضریب انتقال حرارت جابجایی میشود.
نکات کلیدی :
1- ضخامت لایه مرزی به تدریج در طول لوله افزایش مییابد و بعد از به هم پیوستن لایه های مرزی اطراف لوله جریان کاملا توسعه یافته میشود. هرچند بصورت نظری، نزدیک شدن به نمودار توزیع سرعت کاملا توسعه یافته به شکل مجانبی است و تعیین محلی معین و دقیق که در آنجا جریان در مجرا کاملا توسعه یافته است، غیر ممکن میباشد. با اینحال برای تمام کاربردهای عملی طول ورودی هیدرودینامیکی محدود است.
2- به فاصلهای که در طی آن سرعت کاملا توسعه یافته میشود طول ورودی هیدرودینامیکی میگویند.
3- به فاصلهای که در طی آن نمودار توزیع دما کاملا توسعه یافته میشود طول ورودی گرما میگویند.
سیستمهای تبرید-ساختمان یخچال
سیستمهای تبرید-ساختمان یخچال
اجزای تشکیل دهنده یخچال را به دو دسته مکانیکی و الکتریکی تقسیم میکنند:
اجزای مکانیکی یخچال
کمپرسور
کار کمپرسور ، ایجاد فشار و مکش جهت به حرکت در آوردن گاز در سیستم است. در داخل کمپرسور یک موتور الکتریکی تک فاز و یک مجموعه مکانیکی شامل سیستم سوپاپ و پیستون و میل لنگ قرار دارد. با رسیدن برق به موتور کمپرسور و به چرخش درآمدن روتور آن توسط میللنگ ، پیستون به حرکت در آمده و سوپاپهای مختلف باز و بسته می شوند. در نتیجه گاز به گردش در میآید. کمپرسور تنها از طریق سرلوله به بیرون ارتباط دارد.
صرفنظر از لوله کور که جز در موارد تخلیه یا شارژ گاز مورد استفاده قرار نمیگیرد، دو لوله دیگر از اهمیت بسزایی برخور دارند. حرکت پیستون داخل سیلندر کمپرسور مرتبا گاز را از لوله برگشت مکیده و با فشار وارد لوله رفت میکند. به این ترتیب گاز سرما ساز مدام در حال حرکت است و عمل سرماسازی را انجام میدهد.
رادیاتور خنک کننده ( کندانسور)
گاز سرد کننده وقتی در داخل کمپرسور تحت فشار قرار گیرد، حرارت آن افزایش مییابد. حال اگر به طریقی این گرما سلب نشود و یا تعدیل نگردد، عمل سرماسازی مختل میشود. از این رو در یخچال ، گاز تحت فشار و گرم شده از کمپرسور وارد لولههای مارپیچ مانند که در تماس مستقیم هوا است (جای این لوله ها در یخچال های خانگی پشت کابینت اصلی یخچال است) میشوند. دمای گاز در اثر ارتباط هوا کاهش یافته و عمل سرماسازی در سیستم به سهولت انجام میشود. به منظور حفاظت لولههای فلزی کندانسور در برخورد با اشیا و اجسام خارجی ، مفتولی در اطراف کندانسور تعبیه میکنند.
فیلتر ( درایر)
گاز پس از آنکه در داخل کمپرسور تحت فشار قرار گرفت، به منظور کاستن از حرارتش راهی کندانسور میشود. از آنجا که ممکن است در عبور از این مسیر جرم هایی را نیز حمل کند و یا دارای رطوبت باشد، لازم است قبل از سرماسازی کاملا پاک و خشک شود. بنابراین پس از رادیاتور ، از فیلتر عبور میکند. فیلتر دارای دو لوله ارتباطی است.
یکی از لولهها سطح مقطع بزرگتری دارد که در واقع ورودی فیلتر است و به خروجی کندانسور وصل میشود. در ورودی فیلتر شبکههای توری ریزی برای گرفتن جرمهای زائد قرار گرفته است. خروجی فیلتر که سطح مقطع کمتری دارد به لوله مویین متصل میشود، تا گاز سرد کننده تحت فشار زیاد قرار گیرد. در این خروجی نیز شبکههای توری با سوراخهای بسیار ریز قرار گرفته است. در فضای میانی فیلتر مواد شیمیایی به نام سیلیکات یا سیلیکاژل قرار دارد، که خاصیت و کار آن جذب رطوبت گاز عبوری است.
لوله مویین ( کاپیلاری تیوب )
لوله مویین ، لولهای با قطر بسیار کم است که به علت باریک بودن به این نام خواننده میشود و نقش مهمی در تولید سرما دارد. محل نصب لوله مویین بین خروجی فیلتر وورودی با اواپراتور (یخ ساز) است. گاز سرد کننده که توسط کمپرسور تحت فشار قرار گرفته با عبور از مسیر کندانسور و فیلتر وارد لوله مویین میشود. در لوله مویین فشار محیط درون آن به حد قابل توجهی افزایش مییابد. لذا گاز سرد کننده که تحت فشار زیاد به مایع تبدیل شده است، با عبور از لوله مویین وقتی که وارد اپراتور میشود، چون ناگهان با حجم زیادی مواجه میگردد، تبدیل به گاز شده و ایجاد سرما مینماید.
اواپراتور ( محفظه یخ ساز)
اواپراتور به قسمتی گفته میشود که بوسیله تبخیر یک ماده خنککننده سبب تولید سرما شده و در صورت قرار گرفتن در یک ناحیه باعث سرد شدن آن ناحیه یا محفظه میشود. در وسایل سردکننده همان محفظه سردکننده را به نام اواپراتور میشناسند. برای انتقال مطلوب و سریع سرما جنس اواپراتور را از آلومینیم انتخاب میکنند. لوله ورودی اپراتور بسیار باریک است که در واقع همان نقطه اتصال آن به لوله مویین است، و لوله خروجی آن سطح مقطع بیشتری دارد و به لوله برگشت کمپرسور میرسد.
موتور الکتریکی
همان گونه که قبلا در مبحث کمپرسور خواندید موتور الکتریکی با یک مجموعه مکانیکی کمپرسور یخچال را تشکیل می دهند.موتور الکتریکی از نوع آسنکدون بوده و دارای دو قطب و قسمتهای عمده آن عبارتند از :
• سیم پیچ اصلی
• سیم پیچ فرعی
• هسته استاتور
• رتور
برای آنکه در موتور یخچال مقاومت اهمی سیم پیچ راه انداز از راکتاس القایی آن زیادتر شود و گشتاور راه اندازی موتور افزایش یابد قسمتی از سیم پیچ استارت را بصورت بیفیلار اجرا می کنند لذا با اهم گیری بین سرهای مشترک و هر کدام از دو سر دیگر میتوان استارت یا اصلی بودن سیم پیچ را تشخیص داد. سرهای الکتروموتور روی کمپرسور درون ترمینال بسته می شود که اصولا بصورت مثلثی است.
طرز کار موتور الکتریکی
وقتی از طریق ترموستات فرمان به موتور می رسد.جریان الکتریکی از رله استارت و سیم پیچ اصلی عبور می کند و چون سیم پیچی راه انداز در مدار نیست جریانی حدود 2 برابر جریان نامی از سیم پیچ اصل عبور نموده و نیروی الکتریکی رله استارت که با مجذور جریان عبوری از آن متناسب است افزایش می یابد و هسته رله را به سمت بالا هدایت میکند و سیم پیچی راه انداز توسط تیغه مربوطه که به هسته متحرک رله استارت متصل است، جریان دار شده و موتور شروع به حرکت نماید.
با حرکت الکتروموتور جریان الکتریکی در سیم پیچی اصل نرمال شده و نیروی رله استارت کاهش یافته و هسته آن در اثر نیروی وزن هسته پایین میآید و تیغه مربوط به سیم پیچی راه انداز را قطع میکند و موتور با سیم پیچی اصلی بکار خود ادامه میدهد.حرکت رتور موتور سبب تحت فشار قرار دادن گاز از یک سمت و مکش از سمت دیگر میشود تا زمانی که اواپراتور (یخ ساز) خنک شده و ترموستات جریان الکتروموتور را قطع می نماید.
ترموستات
ترموستات یک کلید اتوماتیک تنظیم دما است که داخل یخچال قرار دارد. اجزای اصل ترموسات عبارتند از:
• بدنه فلزی
• فانوسک
• کنتاکت های اتصال
• لوله بلو که محتوای گاز حساس است.
• لوله مویین
• فنر و اهرم ها
• پیچ تنظیم
• ولوم
• صفحه مدرج :که درجات مختلف روی آن نوشته شده است.
معمولا لوله بلویی ترموستات را به قسمت تحتانی و یا سقف اواپراتور متصل می سازد. با گرم شدن هوای داخل یخچال و یا افزایش درجه حرارت اواپراتور گاز داخل لوله بلو منبسط میشود. گاز منبسط شده به فانوسک ترموستات فشار آورده و اهرم مربوط به وصل کنتاکتهای اتصال را جابجا کرده باعث اتصال کنتاکت به یکدیگر میشود و لذا ولتاژ شبکه به موتور اعمال میشود و موتور به کار میافتد. با به کار افتادن موتور اواپراتور خنک شده گاز داخل بالن یا مخزن لوله بلو و لوله مویین منقبض شده و فشار از روی فانوسک ترموستات برداشته میشود با جمع شدن فانوسک اهرم کنتاکتها به عقب بر میگردد و اتصال آنها بصورت باز درمیآید که باعث توقف کار موتور خواهد شد.
رله راه انداز (رله استارت)
رله استارت بر سه نوع جریانی ولتاژی و حرارتی می باشد که بیشتر رله نوع جریانی و یا حرارتی دو منظوره (استارت و بار منفی) به کار برده میشود.
رله بار زیاد (بی متال یا اورلود)
هرگاه در کار موتور مشکل بوجود میآید مانند آسیب دیدن سیم پیچهای اصلی با کمکی و یا مسدود شدن مسیر گردش گاز و یا وضعیت بودن ولتاژ و ... جریان دریافتی موتور افزایش یافته و موتور داغ می کند که ممکن است بسوزد. از اینرو استفاده از رله بار زیاد ضروری است. رله بار زیاد یک فیوز حرارتی است که بر روی کمپرسور نصب میشود. کار آن به این شرح است که در اثر گرمای جدار خارجی کمپرسور و یا در اثر عبور جریان الکتریکی موتور از سیم هیتر داخل رله گرم شده و با تحریک صفحه حساس طول آن را افزایش می دهد و سبب جدا شدن کنتاکتهای رله می گردد.
جعبه تقسیم و سیم رابط
جعبه تقسیم یا ترمینال محل ورود کابل اصلی یخچال و تقسیم سیمهای خروجی است. سیم رابط یخچال باید ازنوع کابلی باشد و جهت ارت کردن حتما نوع سه سیمه آن انتخاب شود.همچنین کابل باید قابلیت انعطاف باشد تا هنگام جابجایی مشکل برای آن ایجاد نشود. سطح مقطع سیمهای کابلی باید باشد.
لامپ یخچال
روشن شدن لامپ داخل یخچال به هنگام باز کردن در آن است. توان لامپ یخچال بین 14 تا 40 وات است. این لامپ دارای سرپیچ محکمی است.
شستی معکوس لامپ
شستی لامپ یخچال مانند شستی زنگ اخبار است. با این تفاوت که معکوس عمل میکند یعنی وقتی که در یخچال باز میشود، کلید آزاد است و لامپ روشن می شود. لامپ خاموش میشود. بدین جهت به آن شستی معکوس نیز گفته میشود.
معماری هوشمند ساختمان- مهندسی تاسیسات
: مقدمه
در سال 1970، ورود کامپیوتر و تکنولوژی ارتباطات راه دور، زندگی بشر را متحول کرد. این تغییر و تحول حتی از نظریهای که خود، جلودار این تکنولوژی بود، پیشی گرفت. از سال 1990، زندگی فردی و اجتماعی افراد، با ورود کامپیوتر و ارتباطات راه دور و در نتیجه بیمعنی شدن فاصلهها، تغییرات بسیاری کرد. فضاها و مکانهای فیزیکی و تعاریفشان، درست همانند چهره انسان، در طول زمان دچار تغییر شدهاند. برای مثال اتاقهای ملاقات و کنفرانس شکل مجازی به خود گرفته اند. چرا که بسیاری از عناصر و اجزاء فیزیکی آنها، جای خود را به کامپیوتر دادهاند.
این اتفاق درست همان چیزی است که میتوان نامش را وحدت میان تواناییهای کامپیوتر و دنیای فیزیکی ما دانست. در هم آمیختن دنیای فیزیکی ما با کامپیوتر این امکان را فراهم میآورد تا دنیای بدست آمده با ذهنی کامپیوتری بیاندیشد.
کامپیوتر این توانایی را دارد که اطلاعات را دریاف کند (input) و آنها را با کامپیوترها و ماشینهای دیگر رد و بدل کند. همچنین کامپیوتر میتواند به راحتی کارهایی نظیر، پویش اطلاعات، محاسبه، نتیجهگیری (output) را در مدت زمان کوتاهی انجام دهد. گویی کامپیوترها هم میتواند بیاندیشند، اما سریعتر از انسانها.
امروزه ساختمانها خود گونه ای از تکنولوژی هستند. آنها خود را با تکنولوژی وفق میدهند و از آن بهره میگیرند. ساختمانها به عنوان یک سازه به محض اینکه توانایی کامپیوتر را در اختیار بگیرند، هوشمند خواهند شد. نخستین بنای هوشمند از تکنولوژی در جهت مهیا ساختن محیطی امن و راحت و انرژی زا استفاده کرد. ایده یک ساختمان هوشمند، ارتباط و پیوستگی میان دسترسی، نوردهی، امنیت، نظارت، مدیریت و ارتباط راه دور را پیش رو قرار میدهد. عامل یکپارچگی، این توانایی را به سیستمها میدهد تا بتوانند اطلاعات را میان خود رد و بدل کنند. تبادل اطلاعات میان این سیستمها باعث میشود که خروجی اطلاعات که همان نتیجه نهایی است، بدون ایجاد هر گونه اختلال، انجام شود. از سوی دیگر سیستمهای خروجی اطلاعات و یا تصمیم گیرندههای نهایی، سیستمهایی هستند پاسخگو، که پاسخی مناسب برای اطلاعات ارسالی که از منابع گوناگون به سیستم وارد میشوند، مهیا میکنند. خروجیهای اطلاعات( output ) و سیستمهای تصمیم گیرنده ، اصلیترین و ضروریترین مولفه در این نوع معماری که به نام معماری پاسخگو شناخته میشود، هستند.
این مقاله تحقیقی است کلی و عمومی از معماری هوشمند و بر روی این مسئله به بحث میپردازد که چه زمانی یک «معماری پاسخگو» و «معماری حرکتی» تبدیل به معماری هوشمند میشوند.
تعاریف ساختمانهای هوشمند
مفهوم ساختمان هوشمند معرف نوعی بده و بستان و تبادل قوی و بدون نقص اطلاعات میان بخشهای مختلف ساختمان است. اصطلاح «بخشهای ساختمان»، همه اجزایی را که در اداره کردن ساختمان نقش ایفاء میکنند را در بر میگیرد. بخشهایی نظیر HVAC، بخشهای مکانیکی، ساختمانی، کنترل دسترسی، امنیتی، مدیریتی، نوردهی، نگهداری و تعمیرات، شبکه محلی و مدیریت انرژی. ساختمان هوشمند یعنی کنترل و مدیریت اجزاء یک بنا توسط کاربرانی که از تواناییهای کامپیوتر استفاده میکنند تا نیازها را برآورده سازند. نیازهایی که ممکن است شامل کارآمدی، سودمندی و ذخیره انرژی، سرگرمی، ایجاد شعف و شادی، آسایش، بازگشت سرمایه و کم کردن هزینههای زندگی باشد. بنابراین لزومی ندارد که تعریف یک ساختمان هوشمند را به موفقیتها و اهداف بسیار ویژه وآرمانی ربط داد. چرا که تعریف این موفقیتها و اهداف از موقعیتی به موقعیت دیگر تغییر میکند و نزد افراد گوناگون، تعاریف گوناگون دارد. یک ساختمان هوشمند باید دارای عملکرد یکسانی باشد تا این توانایی را داشته باشد که نیازهای مختلف و گوناگون را پاسخ گوید.
دانشمندان لغت «ساختمان هوشمند» را اینگونه تعریف کردهاند: «بنایی که در آن از آخرین تکنولوژیها استفاده شده باشد». با این تعریف مشخص است که آنها به بنایی هوشمند میگویند که دارای بروزترین سیستمهای ساختمانی باشد. اگر چه نوآوری و ابداع در ساختمانهای هوشمند بسیار مهم است اما این به آن معنی نیست که لزوماً تبادل اطلاعات و یکپارچگی سیستمهای ساختمان موجب میشود که آنرا هوشمند بنامیم.
سمپوزیوم بین المللی معماری در سال 1985 در تورنتو تصریح کرد که: «یک ساختمان هوشمند آمیزهای است از ابداعات (خواه این ابداعات تکنولوژیک باشد خواه خیر) به همراه مدیریتی بدون نقص که در این راستا و با داشتن این دو ویژگی سرمایه صرف شده تا حد زیادی باز گردد. این تعریف علاوه بر لزوم وجود ابداع و نوآوری و استفاده از تکنولوژی این موضوع را نیز یادآوری میکند که یکی از اهداف ساخت ساختمانهای هوشمند، اینست که ساختمانهایی ساخته شوند که هر چه بیشتر سرمایهای را که در ساخت و ساز صرف شده است برگردانند. ممکن است اینگونه به نظر برسد که این اهداف تنها در ساخت ساختمانهای تجاری و اداری مدنظر قرار داده میشود اما در ساخت خانههای مسکونی به آنها توجه نمیشود. مگر اینکه این اهداف در راستای توجه به آسایش و راحتی مردم و توجه به استفاده بهینه و بهرهبرداری تمام و کمال از سرمایه، مورد توجه قرار گیرند. به علاوه اهداف دیگری که در ساخت بناهای تجاری و اداری مورد توجه است، در تعریف بالا ذکر نشده است. ارائه تعریف برای بناهای هوشمند بر مبنای ذکر اهداف ضروری در تعریف EIBG (گروه سازنده ساختمانهای هوشمند در اروپا)¹ به وضوح مشاهده میشود که میگوید: «یک بنای هوشمند، بنایی است که کارآیی و راندمان ساکنانش را افزایش داده و امکان مدیریت موثر را بر اساس مقتضیات خاص و با کمترین هزینه فراهم آورد». راندمان و سودمندی تا حدودی غیرقابل لمس و نامحسوس هستند. که تنها با نگاهی به عملکرد گذشته و مقایسه آن با عملکرد جدید، تا حدودی می توان به این دو مفهوم دست یافت. همچنین پایین آوردن هزینهها (راندمان و سودمندی) از جمله اهدافی است که باید توسط سیستمهای کنترل کننده مورد توجه قرار گیرد.
از سویی دیگر در سال 1996، باب، تعریفی برای ساختمانهای هوشمند ارائه کرد." ساختمانی که با بهره گرفتن از تکنولوژی مدرن این امکان را فراهم آورد تا بتوان اجزاء و تجهیزات مختلف را به طور خودکار کنترل کرد". این تعریف به خوبی نشانگر روند تبادل اطلاعات بین اجزاء کنترل کننده و اجزاء کنترل شونده، در ساختمانهای هوشمند است. روند فرماندهی ساختمان در تعریف DEGW ² در سال 1998 ذکر شده است. این تعریف بیان میکند که یک ساختمان هوشمند در برابر نیازهای کاربران خود بسیار پاسخگوتر است و توانایی هماهنگی یا تکنولوژی جدید را دارد و میتواند خود را با تغییرات سازمانی ساختمان، هماهنگ کنند. این تعریف یک مبحث بسیار مهم را درباره روند فرماندهی ساختمان دربرمیگیرد.
کلمه «پاسخگو» در این تعریف بیانگر معنای «خروجی سیستم» است. کلمه «در برابر نیازهای کاربران» معرف توانایی سیستم در شناخت و تشخیص «نیازها» به وسیله تحلیل ورودیهای کاربران است. کلمه «هماهنگی» نشانگر توانایی سیتسم برای هماهنگ شدن است. خواه این هماهنگی توسط خود سیستم انجام شود خواه به وسیله دیگران.
در سال 1988، معماری بنام «اتکین» تعریفی برای ساختمانهای هوشمند ارائه کرد. او گفت: یک ساختمان هوشمند ساختمانی است که از وقایعی که در درون و برون آن رخ میدهد مطلع است و میتواند در مواجهه با این وقایع و برای بوجود آوردن محیطی دلچسب برای کاربرانش، موثرترین و بهترین تصمیمات را در همان زمان بخصوص، اتخاذ کند. «اتکین» در تعریف خود علاوه بر توانایی کسب اطلاعات (input) و توانایی پاسخگویی (output) ، فاکتور زمان را نیز دخیل کرد.بر مبنای این تعریف همه تصمیمات سیستم در مواجهه با وقایع درون و برون ساختمان باید در زمان خاص خود اتخاذ شوند و اگر این تصمیم گیری ها در زمان دیگری انجام شوند، ارزشمند نخواهند بود. کلمه «مطلع است» در تعریف «اتکین» به معنای اطلاعات دریافت شده (input) و وسایل ارتباطی است که اطلاعات به وسیله آنها به سیستم کنترل وارد شده و جمع آوری میشود. کلمه «تصمیم میگیرد» در این تعریف بیانگرهمه انواع پاسخهاست. مانند تصمیم سیستم برای تعادل دمای درون بنا، هماهنگ فرم ساختمان که همه اینها تحت عنوان «خروجی سیستم» (output) قرار میگیرند.
تحولی که در زمینه ارتباطات راه دور و همچنین علم الکترونیک رخ داد موجب گسترش تواناییهای ساختمانهای هوشمند شد. توانایی یادگیری در سیستمهای یکپارچه که شامل اصطلاح «هماهنگی» است و در تعریف DEGW ذکر شده است، موجب میشود که سیستم بتواند از تجربههای مشابه در موارد دیگر استفاده کند. تا با توجه به این تجربهها و آموزهها بهترین تصمیمات را اتخاذ کند. علاوه بر توانایی یادگیری سیستم، اطلاعاتی که بین بخشهای مختلف رد و بدل میشود باید در (BCS) ³ که همان بخش کنترل ساختمان است ، مورد تحلیل و پردازش قرار گیرند که در حقیقت بخش BCS به منزله مغز ساختمان است.
با این اوصاف، ویژگیهای اصلی که یک ساختمان در صورت دارا بودن به نام هوشمند خوانده می شود به قرار زیر هستند.
1ـ ورودی سیستم که وظیفه دریافت اطلاعات را به وسیله ابزارهای دریافت کننده برعهده دارد.( input )
2ـ پردازش و تحلیل داده های اطلاعاتی
3ـ خروجی سیستم که در مواجهه با اطلاعات دریافت شده توسط ورودی سیستم، پس از پردازش آنها، اقدامات لازم را اتخاذ میکند. ( output )
4ـ ملاحظات زمانی که موجب میشود تا تصمیمات اتخاذ شده در زمان مقرر رخ دهند.
5 ـ توانایی یادگیری.
بنابراین تعریف معماری هوشمند باید ویژگیهای بالا را دربربگیرد. در این مقاله به بحث پیرامون این ویژگیها میپردازیم تا سهم و نقش هر کدام را در ساختمانهای هوشمند روشن سازیم.
ورودیها
هر بخشی در یک ساختمان هوشمند باید دارای تجهیزاتی باشد که توسط آنها اطلاعات دریافت شده و وارد سیستم کنترل شوند. سیستم میتواند اطلاعات موردنظر را از چهار روش مختلف بدست آورد.
3ـ1 حسگرها
زمانی که از معماری هوشمند سخن می گوییم، نقطه شروع باید حسگرها باشند. حسگر ها ابزارهایی هستند که اطلاعات داخلی و خارجی ساختمان را جمع آوری میکنند. در فضای داخلی، حسگرها این امکان را برای سیستمها فراهم میکنند تا درک درستی از شرایط درونی ساختمان داشته باشد. در فضای خارجی، آنها اطلاعات را از محیط بیرونی ساختمان، در زمانهای معین دریافت و جمعآوری میکنند.
حسگرها به 3 دسته تقسیم میشوند که حسگرهای درون بیرون بنا زیر مجموعه های این سه قسم هستند. حسگرهای پرتو خورشیدی، حسرگهای نظارتی و امنیتی، حسگرهای آلودگی صوتی، حسگرهای تغییر رنگ و نمای بصری از جمله حسگرهای بیرونی هستند. حسگرهای بخشهایی نظیر بخش انرژی، کنترل هوا، بخش نوردهی، تهویه مطبوع از انواع حسگرهای درون بنا هستند که به وسیله آنها اهداف گوناگونی محقق میشوند.
3 گروه یاد شده به قرار زیر هستند.
3ـ1ـ1 حسگرهای امنیتی و مراقبتی که در خدمت محیط درون و برون ساختمان هستند.
الف. حسگرهای آتش و دود
ب. دوربینهای مدار بسته
ج. حسگرهایی ورود و خروج
د. حسگرهای لرزش و شتاب
هـ ـ حسگرهای حرکت
3ـ1ـ2 حسگرهای تشخیص کیفیت هوا
الف. حسگرهای دما
ب. حسگرهای رطوبت
پ. حسگرهای پرتوهای خورشیدی
ت. حسگرهای فشار هوا
ث . حسگرهای میزان نور
ج. حسگرهای جریان آب و گاز
د. حسگرهای تشخیص محتویات هوای درون بنا
هـ . حسگرهای تشخیص رطوبت هوا
ی. حسگرهای میزان مواد شیمیایی
3ـ1ـ3 حسگرهای نظارتی سیستم
الف. حسگرهای سیستم ساختمانی
ب. حسگرهای نظارت بر سیستمهای مکانیکی
ج. دیگر حسگر ها که اجزای مختلف ساختمان را نظارت می کنند..
حسگرها به منزله عصبهای یک ساختمان هستند که میتوانند شرایط خاص را حس کرده و تصمیمهای موردنیاز در قبال شاریط درونی و برونی بنا را اتخاذ کنند.
3ـ2 بایگانی اطلاعات و رجوع مجدد
هر سیستم هوشمندی باید توانایی بایگانی اطلاعات و رجوع مجدد به آنها را داشته باشد. کلمه رجوع مجدد به این معناست که برای مثال سیستم باید بتواند سناریو مشخصی را در اتاق کنفرانس زمانبندی کند و اگر نیاز باشد که این اتاق به شبکه متصل شود و سیستم تهویه مطبوع خواستار دمای 75 درجه فارنهایت در زمان معینی باشد، سیستم باید بتواند به اطلاعات گذشته خود رجوع کرده و آنها را بازخوانی کند و شرایط موردنیاز را فراهم آورد. بایگانی اطلاعات نقش حافظه را در سیستمهای هوشمند بر عهده دارد.
3ـ3 برنامه ریزی دستی
سیستم باید به گونهای باشد که کاربران خودشان بتوانند آنرا برنامه ریزی کنند. یک کاربر (مدیر شبکه، کاربر مورد وثوق) باید بتواند در هر زمانی با توجه به شرایط و مقتضیات جدید، برنامهای نو بر روی سیستم طرح کند.
3ـ4 اینترنت
اتصال بخشهای مختلف سیستم به اینترنت این امکان را فراهم میآورد تا اجزاء مختلف به روز شوند و اطلاعاتی را که توسط شرکت مختلف کامپیوتری بر روی اینترنت قرار داده شده است، دریافت کنند. بیشتر سیستمهای کامپویتری و کنترلی دارای فایلهای به روزرسانی هستند و شرکتهای فراهم کننده این فایلها را بر روی اینترنت قرار میدهند. بنابراین اگر سیستمی بخواهد به روز باشد وعملکرد بهتری داشته باشد، ناگزیر است با ارتباط با شرکتهای فراهم کننده فایلهای به روزرسانی از طریق اینترنت، سیستمهای کنترلیاش را به روز نگه دارد.
لازم به ذکر است که همه اطلاعات جمع آوری شده از اینترنت به نرم افزار پردازش دادهها تحویل میشود.
نرم افزار پردازش و تحلیل اطلاعات
پردازش اطلاعات در قسمت کنترل ساختمان انجام میشود. (BCS) . BCS همه سیستمها را به صورت یک سیستم واحد کنترل میکند. وهمچنین این توانایی را نیز دارد که هر سیستم را به صورت مجزا کنترل کند. مرکز کنترل ساختمان جایی است که در آن همه سیستمها به صورت واحد در میآیند. لذا این محل به نام «یکپارچه کننده سیستمهای ساختمان» نامیده میشود (BSI). برای اینکه بخشهای گوناگون ساختمان یکپارچه شوند، آنها باید دارای آدرسهایی مشخص باشند تا دیگر اجزاء بتوانند بر مبنای آن آدرسها اجزاء دیگر را بشناسند.
خروجیها
خروجیهای BCS دستورهایی هستند که بر مبنای تصمیمات اتخاذ شده توسط سیستم صادر میشوند. این تصمیمات پاسخهای سیستم کنترل کننده را شکل میدهند و میتوان دست کم آنها را به 2 دسته تقسیم کرد: پاسخهای داخلی و خارجی. پاسخها و دستورات داخلی و خارجی مربوط به سیستم کنترل کننده میشوند. پاسخهای داخلی نوعی از دستورات هستند که همه اقدامات اتخاذ شده در ارتباط با داخل ساختمان را در بر میگیرند. دستورات محاسبه شده و برنامه ریزی شده در درون سیستم از جمله این پاسخها هستند. مثال دیگر برای پاسخهای داخلی سیستم، توانایی یک سازه هوشمند در تغییر امتداد سازة خود است که به این وسیله می تواند در مقابل فشار باد مقاومت کند. پاسخهای خارجی پیامد پاسخهای داخلی هستند که بر مبنای پردازش اطلاعات داده شده شکل میگیرند.
یک پاسخ خارجی میتواند دو شکل داشته باشد: ایستا یا حرکتی. پاسخهای خارجی ایستا مانند تغییرات دما، تغییرات بصری تغییرات صوتی و یا تغییرات نور. از سوی دیگر پاسخهای حرکتی در قالب حرکت هستند. وقتی که سیستم تصمیم میگیرد یک در را باز یا بسته کند. این عمل از جمله پاسخهای حرکتی است که معماری پاسخگو برای کاربرانش فراهم میکند. در قسمت های بعدی در مورد معماری حرکتی و پاسخگو بیسشتر بحث خواهیم کرد.
5 ـ1 معماری پاسخگو
معماری پاسخگو نوعی از معماری است که دارای توانایی پاسخگویی به نیازهای کاربران است . لزومی ندارد که این نوع معماری حتماً از نوع هوشمند باشد. مگر اینکه پاسخهای موردنیاز، نیازمند نوعی پردازش هوشمندانه باشند. برای مثال یک دیوار خشتی در پاسخ به هوای گرم بیرون خانه، هوای سرد و خنک را در فضای داخلی فراهم میآورد. این کنش از جمله خصوصیات مصالح است و البته جدا از پردازش هوشمندانه نیست. چرا که دیوار خشتی درست بر مبنای اطلاعات داده شده از بیرون ساختمان و پردازش آن دست به کنش خنک کردن فضای درون ساختمان زده است. لذا این واکنش جزو معماری هوشمندانه به حساب میآید.
بعضی تعاریف در مورد پاسخگو نشان میدهند که این نوع معماری معرف نوع خاصی از پاسخگویی است که همانا پاسخگویی حرکتی نام دارد. «فاکس» در سال 2003 گفت: «درونمایه یک سیستم پاسخگو اینست که چگونه سازههای مکانیکی را در کنامعماری ر هم قرار دهیم تا بر یکدیگر کنش متقابل و هوشمندانه داشته باشند». اما چه اتفاقی میافتد اگر یک سیستم پاسخگو، پاسخهایش به صورت ایستا باشد؟ مانند آنچه در مورد تغییرات دما و رنگ رخ میدهد. «استرک» در سال 2003 معماری پاسخگو را اینگونه تعریف میکند. «نوعی از معماری که شامل اصلاحات و تغییراتی در فرم است تا به طور مداوم در برابر شرایط محیطی که آنرا احاطه کردهاند، عکس العمل نشان دهد». مادامیکه بپذیریم که تغییرات در ساختار تنها نوعی پاسخ است. در نتیجه اصطلاح معماری پاسخگو بر بمبنای تعریف بالا ویژگی هوشمندی را نادیده میانگارد تا نوعی خاص از پاسخهای حرکتی را معرفی کند. و این پاسخهای حرکتی باید تمامی کنشها را در معماری در بر بگیرند.
بنابراین معماری هوشمند و پاسخگو شامل همه اصول و مبادی معماری است که توانایی فراهم آوردن پاسخ هوشمندانه به همه نیازهای درونی و برونی کاربران را دارد.
نوع پاسخگویی که "فاکس" و "استرک" در تعریف خود از معماری پاسخگو، معرفی کردهاند (پاسخگویی حرکتی) معماری پاسخگو را یک درجه بالاتر میبرد. در قسمتهای بعدی در این باره بیشتر بحث خواهیم کرد.
معماری هوشمند
5 ـ 2 معماری حرکتی
سرچشمه حرکت در معماری حرکتی به هنر برمیگردد. در آغاز قرن 19، هنرمندان تلاش کردند مجسمههایی بسازند که دارای اعضای متحرک بودند. مجسمه «شادی بیروح» اثر دانیل روزین که در سال 1999 ساخته شد یکی از نمونههای مجسمههای حرکتی است که در آن از تکنولوژی الکترونیکی استفاده شده است. هم چنین هنرهای حرکتی در معماری به عنوان کارهای هنری در ساختمانها و گاهی هم در درون بناها به کار گرفته شده است.
در زندگی چادرنشینان نیز معماری حرکتی مشاهده میشود . چادرهای آنها سازههایی متحرک هستند که قابلیت جمع شدن دارند و چادرنشینان میتوانند آنها حمل کنند. سازههای حرکتی به عنوان سازههایی تاشو و قابل حمل همچنان در معماری حرکتی قابل مشاهده هستند. "فاکس" در سال 2000 معماری حرکتی را این چنین تعریف کرد: «بنایی است با موقعیت متغیر و سیار و هندسهای متغیر و حرکتی». او انواع سیستمهای حرکتی را شرح داد که یکی از آنها سیستم تاشو بود. بنابراین مفهوم معماری حرکتی در اصل یک مفهوم هوشمندانه نیست اما نوعی توانایی را در ذهن متبادر می سازد که میتواند سازهها را کنترل کند و اجزای مخلتف آن را حرکت دهد.
اکنون سعی میکنیم تا مفهوم حرکت را در مقابل هوشمندی به عنوان پاسخی که ساختار بنا را تغییر میدهد، معرفی کنیم. "کالاتراوا" نمونهای ارائه کرد تا حرکت را در ساختمان به کار گیرد. با توجه به دستورالعمل کالاتراوا در سازه های حرکتی خود، میبینیم که او در کارهایش این امکان را به وجود میآورد تا ساختار سازه حرکت کند. برای مثال سقف موزه میلواکی این قابلیت را دارد که حرکت کرده و یا تغییر شکل دهد. (http://www.calatrava.com)
قدم بعدی را با توجه به تعریف "اوستر هویز" (2002) برمیداریم. که میگوید: ساختمانی دارای معماری حرکتی است که مجهز به حسگرهاییباشد که سیستم را تحریک کنند تا بتواند به اطلاعاتی که به شکل حرکتی دریافت میکند، پاسخ گوید.
5 ـ 2ـ1 مکانیزم کنترلی در معماری حرکتی
برای درک بهتر مکانیزم کنترل به شرح انواع گوناگون کنترل (دستی و سنتی) و چگونگی تبدیل آنها به انواع هوشمند، خواهیم پرداخت. سه نوع مکانیزم اصلی برای کنترل در معماری حرکتی وجود دارد. 1ـ مکانیزم درونی 2ـ مکانیزم برونی 3ـ مکانیزم مرکب.
در نوع اول، سیستم به بخشهای کوچک تقسیم میشود که این تقسیم شدن این امکان را به سیستم میدهد که بخشهای مختلف را تغییر دهد. برای این نوع از کنترل میتوان سیستم تاشو یا چین خورده را به عنوان مثال مطرح کرد. نوع دوم یعنی مکانیزم برونی، توانایی سیستم در حرکت کردن است. خواه این حرکت توسط خودش انجام شود خواه توسط نیرویی دیگر. برای این نوع از مکانیزم کنترل میتوان دیوارهای حائل را مثال زد که میتوان آنها را در جایی نصب کرد یا برداشت . و سر انجام مکانیزم مرکب، ترکیبی است از مکانیزم درونی و برونی تا این توانایی را به سیستم بدهد که بتواند ساختار خود را از برون تغییر دهد. و همچنین تمام سیستمهای خود را به صورت تمام و کمال حرکت دهد. مکانیزم کنترل درونی، برونی و مرکب. مکانیزمهایی هستند که به هر سازهای امکان تغییر ساختار را میدهد. و البته میتوان آنها را به صورت دستی نیز کنترل کرد. کنترل دستی میتواند هوشمند نیز باشد. انواع دیگر کنترل عبارتند از:
1ـ کنترل مستقیم
در این نوع از کنترل، حرکت و کنترل از یک منبع مستقیم است. این منبع مستقیم و بی واسطه شامل همه خروجی های انرژی نظیر موتورهای الکتریکی و نیروی انسانی میشود. حرکت بدون واسطه نورگیر سقفی و هم چنین حرکت دادن پارتیشنهای متحرک از نمونههای این نوع کنترل است.
2ـ کنترل ورودی
در این نوع از کنترل، تجهیزات دریافت اطلاعات ، موردنیازاست. حرکت در این نوع از کنترل ، نتیجه بازخورد اطلاعاتی است که ورودیها دریافت میکنند. حسگرها و سیستمهای برنامه ریزی شده، نمونههایی از این تجهیزات هستند. برای مثال، حسگرها میتوانند با اتخاذ تصمیمات مستقیمی که خود میگیرند در سیستم تغییراتی ایجاد کنند.
3ـ کنترل توسط ورودیهای متعدد
کنترل و حرکت در این قسم خاص توسط ورودیهای متعدد انجام میشود. حسگرهای متعدد نمونههایی از این ورودیها هستند که اطلاعات را از منابع مختلف دریافت کرده، تا بهترین تصمیمات در رابطه با آنها اتخاذ شود.
4ـ کنترل توسط حسگرهای متعدد که همه جا را پوشش میدهند.
در این قسم از کنترل حسگرهای خودکار و تحریک کنندة بسیاری موردنیاز است . حرکت در این نوع از کنترل نتیجه ورودیهای تحلیل شدهای است که حسگرها با تحریک کردن سیستم از خود بروز میدهند تا پاسخی مناسب را صادر کرده باشند (output) در این قسم از کنترل کل نمای ساختمان میتواند متحرک باشد. و هم چنین نمای بنا میتواند به شکل منحنی باشد.
5 ـ کنترل هوشمند با ورودیهای متعدد
در این قسم از کنترل، سیستم توانایی یادگیری خود را در مکانیزم کنترل، به صورت یکپارچه در میآورد. در این نوع از کنترل سیستم از تجربهها استفاده میکند تا به بهترین راه حل دست پیدا کند.
ملاحظات زمانی یک فاکتور بسیار ضروری است که باید در آغاز کار کنترل مستقیم، لحاظ شود. با توجه به تکنولوژی پیشرفته و کنترل کامپیوتری و توانایی ساخت اجزائ متحرک با کیفیت بالا، راه حلهای معماری حرکتی و هوشمند ، عملی و تأثیرگذار خواهند بود.
5 ـ2ـ 2 حسگرها در معماری حرکتی
حرکت در این نوع از معماری میتواند به سادگی باز کردن یک در یا پنجره یا به پیچیدگی حرکت دادن یک سازه باشد. پاسخهای حرکتی یکی از تصمیمات عملی در میان پاسخهای BCS است. برای مثال ممکن است سیستم به منظور تازه شدن هوای یک اتاق تصمیم به پالایش هوای اتاق و یا روشن کردن تهویه مطبوع بگیرد، اما سیستم باید این اختیار را نیز داشته باشد که بتواند در زمانهای مناسب برای دستیابی به هدف تازه شدن هوای اتاق ، پنجرهها را نیز بگشاید. ساختمانی منحنی شکل میتوانند از حسگرها و تحریک کنندهها استفاده کند تا با ایجاد حرکت به کنشهای موردنظر دست پیدا کنند. سازه هایپرسرفیس(hyper surface)، ساخته "داکوی" نمونهای بسیار خوب برای معماری منحنی شکل حرکتی و هم چنین آن نوع از معماری است که از درون کنترل میشود. در این سازه دیوار فلزی تراش خورده با تاثیر از محیط اطراف تغییر شکل یافته و شکلش عوض میشود. این دیوار نسبت به حرکت، صدا و نور در زمانهای معین، واکنش نشان می دهد. همچنین یک بنا میتواند با استفاده از حسگرها از شرایط و مشکلات احتمالی موجود مطلع شود. نیاز به مقاومت بیشتر در برابر وزش باد با افزایش کشش درونی از طریق حسگرهای تحریک کننده، پاسخ داده می شود. برای نمونه، در حال حاضر، دانستهها و مفروضات فیزیکی و شیمیایی دربارة بتون توسط حسگرها میکروالکترومکانیکی بدست میآید. این حسگرها در بتون جاسازی می شوند تا بتوانند مقدار Ph ، رطوبت، دما و غلظت یونهای کلورید ، سدیم و پتاسیم را اندازه گیری کنند. بعضی از کمپانیهای الکترونیکی نیز، مانند کمپانی زیمنس از این حسگرها برای کنترل سیستم هایشان بهره میگیرند.
ملاحظات زمانی
به عنوان یکی از ویژگیهای هوشمندی، زمان، یکی از مهمترین مسائل در سیستمهای هوشمند است. چرا که همه کنشها و تصمیمات باید در زمان مقرر و یا رأس زمان خاصی انجام شود. برای مثال، هشدار دهندههای آتش باید در زمان مقرر هشدار دهند و سیستم نگهداری از تاسیسات باید در زمان مقرر این مشکل را گزارش دهد تا بنا در موعد مقرر بچرخد تا از پرتو خورشید دور بماند. گاهی اوقات سیستم در تشخیص و پردازش اطلاعات داده شده دچار اشتباه میشود که این مسئله منجر به تأخیر در اقدامات سیستم میشود. برای نمونه، ممکن است که دود آتش در ابتدا برای سیستم به عنوان دود سیگار قلمداد شود. اما پس از آن و در مدت زمانی کوتاه سیستم قادر به تشخیص خواهد بود که دود متعلق به آتش است. در این مورد، سیستم باید این توانایی را داشته باشد تا حساسیت خود را اصلاح کند و روند پردازش خود را به گونهای تغییر دهد که در نوبت بعد بتواند دود آتش را تشخیص دهد(قابلیت یادگیری و رجوع مجدد به حافظه). از این روند میتوان به عنوان توانایی یادگیری نیز یاد کرد.
7 ـ ویژگی تجربه آموزی یا توانایی یادگیری
این ویژگی را اینگونه میتوان تعریف کرد: دستهای از قوانین که پیروی از آنها احتمال حل مشکلات را افزایش میدهد. به طور چکیده، این ویژگی نوعی توانایی است که با استفاده از آن سیستم از تجربههای پیشین درس میآموزد. تنظیم زمان تصمیمگیری نمونهای از برنامهنویسی مجدد سیستم با توجه به تجربههای گذشته است. لذا تنظیم سیستم بر مبنای اطلاعات جدید داده شده صورت می گیرد. اطلاعات توسط حسگرها داده میشوند و یا توسط افراد. در یک اتاق کنفرانس ، سیستم میتواند افزایش تعداد افراد را دریابد، بنابراین دمای هوای اتاق را از 75 درجه فارنهایت به 65 درجه کاهش میدهد تا به گرمای حاصل از تجمع 20 نفر در یک اتاق فائق آید. اما پس از این عمل که به صورت خودکار انجام می شود. فردی که وظیفه میدیریت کنترل را بر عهده دارد تشخیص می دهد که باید دما از 65 تا 58 کاهش یابد و تغییرات را به صورت دستی در سیستم اعمال می کند. بنابراین در طول این روند سیستم میآموزد که محاسبهاش در تقلیل 10 درجهای دمای هوا چندان دقیق نبوده است. لذا در نوبت بعد و با تجمع 30 نفر، سیستم سعی میکند با توجه به تجربه قبلی گرمای حاصل از هر نفر را محاسبه کند. این توانایی مسئلهای بسیار مهم در موقعیتهایی نظیر آتش سوزی و نگهداری تاسیسات است.
نمونههایی از معماری حرکتی
بررسی و بحث دربارة ساختمانهای موجود که با ایدة حرکتی هوشمند ساخته شدهاند بسیار لذت بخش است.
8 ـ1 ساختمان دوار
نخستین نمونه ، ساختمان دوار نام دارد. این بنا از حرکت منحنی شکل به عنوان کنترل کننده بیرونی سود میجوید. این بنا میتواند با استفاده از یک موتور، هر شکلی را از نقطه نظر طرح و نقشه به خود بگیرد. همچنین این توانایی را دارد 360 درجه بچرخد. این بنا با سیستم کنترل مستقیم کار می کند به این صورت که چرخش این بنا با استفاده یک دکمه خاموش و روشن انجام میپذیرد. در واقع، همه دیوارها در این بنا میتواند از جای خود حرکت کنند تا ساختمان بتواند نماهای بصری متفاوتی را ارائه کند. این بنا میتواند 100 بار در یک راستا و 1000 بار در راستایی دیگر بچرخد در حالیکه همه تأسیسات آن به طور کامل نقش خود را ایفا میکنند.
آیا حسگرهایی نیز در این بنا وجود دارند؟
حسگرهایی در این ساختمان وجود دارند که صاحبش را از هر گونه تراوش و در هم آمیختن گاز ویا هر شیء سیال و روانی مطلع می کنند. هر وقت که صاحب خانه نیاز به نمایی بیرونی داشته باشد میتواند آنرا بدست آورد. هر مشکلی در این ساختمان با سیستم کنترل مستقیم حل میشود. درجه دقت و هوشمندی سیستم با کار گذاشتن حسگرها به منظور دریافت اطلاعات و کنش متقابل، افزایش مییابد. حسگرها میتواند محل اتاق خواب را تغییر دهند تا بدور از نور خورشید، گرما و یا روشنایی قرار گیرد. از سویی دیگر صداهای مزاحم نیز قابل رفع هستند و همچنین منظره اطراف در هر زمان و در هر نقطه از این خانه قابل رویت است. در چنین خانهای نیاز است تا 7 بار در طول 24 ساعت سیستمهای کنترلی ، مکانیکی، لوله کشی و سیستمهای الکتریکی چک شوند. به علاوه دیگر سیستمها نیز باید آنقدر یکپارچه و هماهنگ باشند تا هر گونه نقص و کاستی را در زمان خودش گزارش دهند.
8 ـ2 گنبدی شکلهای متحول شده
"پاتریک مارسیلی" در سال 1986 ایده گنبدی شکلهای دوار را مطرح کرد. و نخستین ساختمان گنبدی را به عنوان الگویی برای کسانی چون "آلبرت واتسون" بنا کرد.
این بنا را میتوان با چوب ، بتون سبک و یا فولاد ساخت. این بنا 300 درجه میچرخد. موتوری به قدرت 1 اسب بخار (475 vatt) دیسک گردان را به حرکت درمیآورد. همه اجزاء مکانیکی که گنبد را میچرخانند در قسمت مرکزی ساختمان گردآوری شده اند. چرخش گنبد توسط کنترل مستقیم به وسیله سوییچ خاموش و روشن کنترل میشود. همچنین میتوان به گونه ای سیستم را برنامه ریزی کرد تا از نور آفتاب اجتناب کند.
اینساختمان نمونه ای وفادار به معماری حرکتی است. این بنا میتواند به وسیله کنترل ورودیها جهت خود را تغییر دهد. این ساختمان با توجه به دلایل منطقی ، ساختار بسیار یکپارچه ای دارد. دلایل سازنده آن برای چرخش بنا اجتناب از پرتوهای خورشید و گرما ی هواست. نقص این بنا به دامنه چرخش آن برمیگردد. چرا که این بنا تنها توانایی چرخش 300 درجه ای را دارد. مکانیزم چرخش در سیستم برنامه ریزی شده است. به گونهای که سیستم دارای تجهیزاتی است که حرکت خورشید را نظارت میکند و گرمای خورشید توسط این حسگر دریافت شده و موجب می شود تا ساختمان برای اجتناب از نور خورشید بچرخد. این حسگر میتوان با توجه به حرکت خورشید تصمیم بگیرد که آیا ساختمان نیاز به چرخش دارد یا خیر.
8 ـ3 ساختمان تار
در خلال بحث درباره معماری حرکتی باید از تلاش"دیلر" و "اسکانیدو" یاد کنیم که سعی کردند ساختمانی بسازند که از مصالح گوناگونی در آن استفاده شده است. این ساختمان به نام «چادرتار» مشهور است. آنها این بنا را با استفاده از مصالح فلزی بر روی یک دریاچه ساختند که هزاران پیستوله یا قطرات بسیار ریز آب را به روی سازه بنا اسپری میکنند. این سازه قایق مانند حتی در زیر باران به وسیله تکنولوژی اسپریهای پرفشار در تودهای از هوای مه مانند که دقیقه به دقیقه تغییر میکند، احاطه میشود.
آنها الگویی از استفاده آب را در معماری ارائه کردند که با توجه به نیازهای خود و کاربران ، اشکال گوناگون به خود میگیرد. آنها برای تنظیم میزان اسپری آب از کامپیوتر استفاده کرده اند. میزان و قدرت اسپری آب در شرایط اقلیمی متفاوت در زمینه دما، رطوبت و جهت و سرعت باد توسط کامپیوتر تغییر میکند.
نتیجه
بنابراین یک ساختمان هوشمند بنایی است که توانایی پاسخگویی (output) به نیازهای کاربرانش بر مبنای اطلاعات پردازش شده که توسط ورودیهای متعدد فراهم آمده را دارد. فاکتور پاسخگویی در زمان معین در این ساختمان بسیار مهم و ضروری است. تجهیزات متعدد دریافت کننده و ارسال کننده ، اطلاعات را با توجه به نظارتی که بر تغییرات محیط درونی و برونی بنا دارند دریافت میکنند. همچنین فراموش نشود که یکی مولفه های اصلی یک بنای هوشمند دارا بودن توانایی یادگیری است. قبل از ساخت یک بنای هوشمند برنامه ریزی سیستم بسیار مهم است تا اهدافی را که میخواهید به آن بدهید خوب بشناسد. نیاز واقعی برای داشتن یک ساختمان هوشمند میتواند با دقت به نتایج آشکار شود و اینکه آنها این نیاز با ساختن این بنا رفع میشود یا خیر. برای مثال بهرهوری یکی ضروریات شرکتهاست. محیط درونی یک دفتر کار تعیین کنندة فاکتورهای بسیار زیادی برای بهرهوری یک کارمند است. به عنوان یک مثال ساده، من نمیتوانم در دفتر کارم بیش از 3 ساعت به طور مداوم کار کنم. به این دلیل که دمای هوا در دفتر کارم پایین است. بنابراین هر گاه که احساس سرما میکنم مجبورم از دفتر خارج شده و به فضای باز بروم و در حدود 10 دقیقه از گرمای خورشید استفاده کنم و سپس به دفترم برگردم. مسئول تأسیسات تصمیم گرفت که تقریباً هر روز تکنسینی را فرا خواند تا اتاقها را چک کند و دما را افزایش دهد. تلف کردن وقت در هنگام کار به خاطر اشکال در تهویه مطبوع هوا باعث میشود که مییزان بهرهوری کاهش یابد. که این مسئله به معنای حیف و میل منابع یک شرکت است.
اهدافی که با ساخت یک ساختمان هوشمند به دست میآید تقریباً تمام وجوه زندگی انسان را در برمیگیرد. بهره وری، راندمان بالا، ذخیره انرژی، سرگرمی، فرح و شادی، آسایش، پایین آوردن هزینههای زندگی و افزایش عمر بنا، همه و همه نمونههایی از این نوع اهداف است که با ساخت بناهای هوشمند به دست میآیند.
یک ساختمان هوشمند باید دارای سیستمی از اعصاب باشد که شامل حسگرها و تحریک کنندههای تعبیه شده است که اطلاعات را در زمان درست و صحیح خود کنترل میکند. با این اوصاف، بنا میتواند به صورت ایستا یا حرکتی عمل کند. بنابراین تغییر یا عدم تغییر در ساختار درونی یا برونی بنا نمونههایی از توانایی یک بنای هوشمند است. سیستم اعصاب بنا وظیفه یکپارچه کردن همه سیستم ها را بر عهده دارد تا ساختمان هوشمند شکلی انعطاف پذیر داشته باشد تا بتواند در مواجهه با تغییرات محیطی که در آن واقع شده است ، کنش مناسبی داشته باشد . به عنوان یک انسان، کاربران بنا باید بتوانند بفهمند که بنا شاد است یا غمگین، ناخوش است یا سرحال. از سویی دیگر بنا نیز باید توانایی درک حال کاربرانش را داشته باشد تا بر طبق حال آنها عمل کند.
بر طبق تعاریف اصطلاحات گوناگون استفاده شده، واضح است که معماری پاسخگو در همه فضاهای بنا و همچنین در معماری بنا نقش موثری را بازی می کند. معماری و فضای ساختمان هر دو باید ویژگیهایی داشته باشند که پاسخگوی نیازهای کاربران باشند. معماری پاسخگو نباید به یک یا دو نوع از واکنشها محدود شود. بلکه باید تمامی کنشها از جمله کنشهای ایستا، حرکتی، درونی و برونی را شامل شود. به علاوه در معماری پاسخگو، نوعی معماری هوشمند نیز مورد نیاز است چرا که پاسخ نتیجه پردازش هوشمندانه است.
معماری حرکتی هوشمند نیست مگر آنکه حرکت نتیجه پردازش هوشمندانه باشد اگر نه چادر هم یک پناهگاه متحرک است که قابلیت تا شدن و حمل شدن را دارد. معماری هوشمند جدید باید همة انواع کنشها را که هر در ایفای نقش خود ، خوب عمل می کنند را دارا باشد
تشریح لوله کشی ساختمان - تصویری
لوله آب مصرفی پس از کنتور به شیر قطع و وصل و شیر یکطرفه در ورودی ساختمان متصل می گردد. از آن پس با توجه به شبکه لوله کشی و تجهیزات آب رسانی مورد استفاده در ساختمان ها، بسته به این که تک واحدی یا مجموعه ای از چند واحد مسکونی، تجاری یا اداری باشد، ادامه مسیر لوله کشی می تواند بسیار متنوع باشد. آب معمولا از پایین ترین قسمت شبکه لوله کشی با یک انشعاب اصلی نخست به شیر تخلیه و سپس وارد لوله تقسیم کننده می گردد. آن گاه از این لوله انشعاب های مناسب برای تهیه آب گرم مصرفی و لوله های تغذیه آب سرد طبقات و زیر زمین جدا می شود. در صوت استفاده از دستگاه سختی گیر در سیستم حرارت مرکزی و تهویه مطبوع، انشعاب دیگری نیز برای آن در نظر گرفته می شود. بهتر است یک شیر فلکه سرشیلنگی نیز برای برداشت آب در موتورخانه نصب گردد. لوله های آب گرم خروجی از منبع آب گرم همراه لوله وارد سرویس ها شده، وسایل بهداشتی را تغذیه می کند.
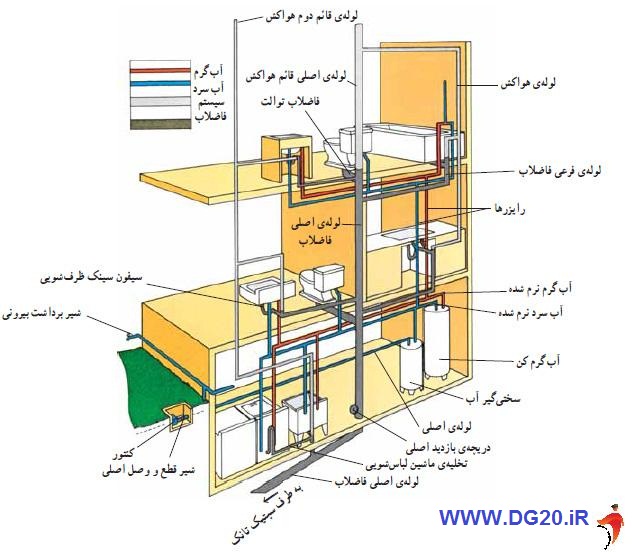
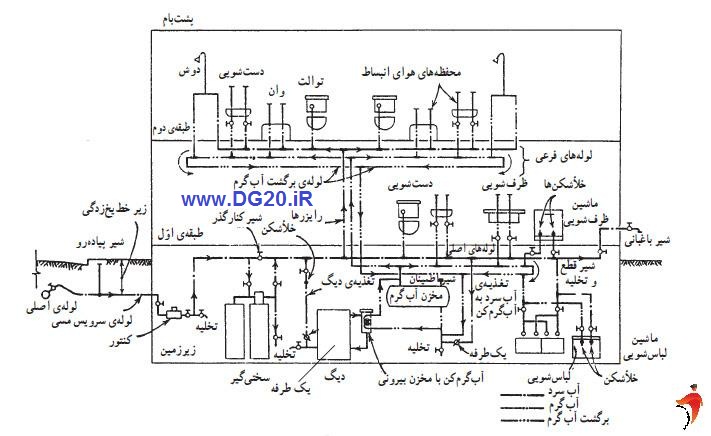
در ساختمان های بزرگ تر و چند واحدی، معمولا یک یا چند مسیر برای بالا رفتن لوله های آب در نظر گرفته می شود. هر کدام از لوله های بالارونده در ابتدای مسیر باید دارای شیر فلکه قطع دستی باشد. لوله انشعاب در طبقات نیز بایستی مجهز به شیر فلکه قطع و وصل برای کلیه لوله های سرد و گرم مصرفی باشد. سپس توزیع آب سرد و گرم مصرفی در طبقات و واحدهای جداگانه مشابه سرویس های ساختمان قبلی انجام می گیرد. در صورتی که استفاده از سقف کاذب امکان پذیر باشد بهتر است لوله کشی در هر واحد در داخل سقف کاذب همان طبقه انجام گردد. شکل 5 نحوه گردش آب در لوله بالا رونده را نشان می دهد.
همان طور که در سیستم لوله کشی ملاحظه می نمایید، علاوه بر لوله های آب سرد و آب گرم لوله سومی نیز وجود دارد که "برگشت آب گرم" یا لوله "گردش آب گرم" نامیده می شود. این لوله معمولا از آخرین مصرف کننده گرفته می شود و در محل ورود آب سرد به منبع آب گرم وصل می شود. کار آن گردش دائمی آب بین مصرف کننده ها و منبع آب گرم است خواه شیر مصرف کننده باز و خواه بسته باشد. وجود این لوله باعث می شود که با باز کردن شیر آب گرم در فاصله زمانی کمتری به آب گرم دست پیدا شود و از هدر رفتن آب جلوگیری به عمل آید.
پروژه شرکت اسپانیایی برای تبدیل بیابان های عربستان به قطب کشاورزی جهان

استودیو معماری اسپانیایی "فوروارد تینکینگ آرکیتکچر" روشی برای تبدیل شبه جزیره عربستان با شرایط محیطی نامهربان این منطقه به یک هاب کشاورزی جهانی از طریق ایجاد ارتباط بین بیابان، انرژی تجدیدپذیر و شیوه کشاورزی هیدروپونیک - فن کاشت گیاهان بدون خاک - را مد نظر قرار داده است.